Other projects (swipe to see more)
Gaming chair & Handbbrake
Logitech G920 wheel pedals and shifter with a custom seat, frame and Handbrake
for the seat and the frame its pretty much straight forward ill talk here about the
Handbreake
I made.
Mechanical part:
The Handbbrake itself is a bent cane attached to a spring to have the
feedback
force.
Electronic part:
A click will occure if the cane touches the metal pice then a signal will
be
sent to the motherboard of the wheel (Which I opened and soldered the cables into the
motherboard).
Software part:
As I soldered the cables into a specefic button of the wheel no programming was required all I
had to do is to assign to this click the Handbrake function in the settings of the game.
Note: So basically I sacrificed a rarely used button in a way that I'll
get the same output either I clicked on that button or I used my custom Handbrake.
Job scripts
Idea:
In my previous IT customer service role, I encountered a significant amount of repetitive tasks. To address this issue, I developed a script that streamlined and simplified these tasks.
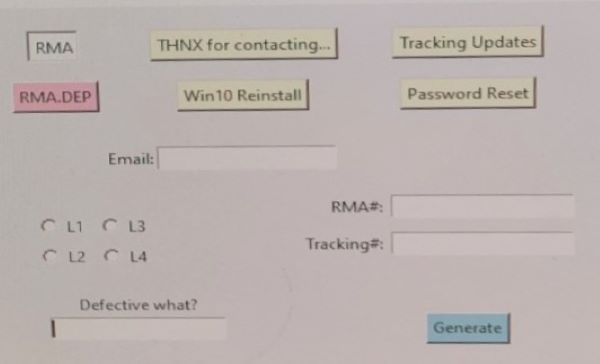
Email script:
I developed a Python program that generates and sends formatted emails using various libraries and tools:
I used DOCX to interact with Microsoft Word templates for creating content.
Win32com.client was employed to generate and send Outlook emails programmatically.
To navigate and access Windows files, I utilized the pathlib library.
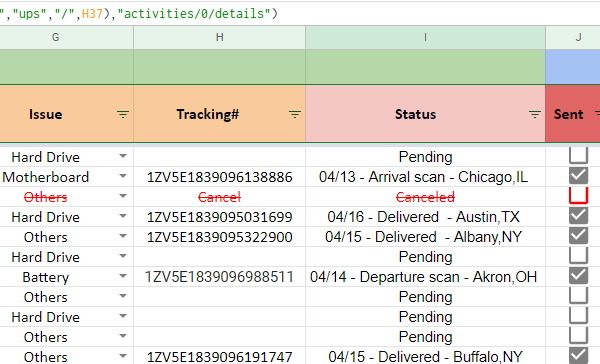
Google sheet script:
We used to log calls on a Google Sheet and manually input everything. To streamline this process, I developed some scripts to automate the input of:
Date and time: As soon as you begin typing, a cell will be automatically populated with the current date and time.
Duration of the Call: A new cell will be automatically populated with the call duration when you finish the call and select the call type (e.g., Fixed, Warranty, etc.).
Tracking Info: The delivery status is updated in real-time, automatically.
Script: I utilized Package Tracker and customized the outputs to align with my requirements.
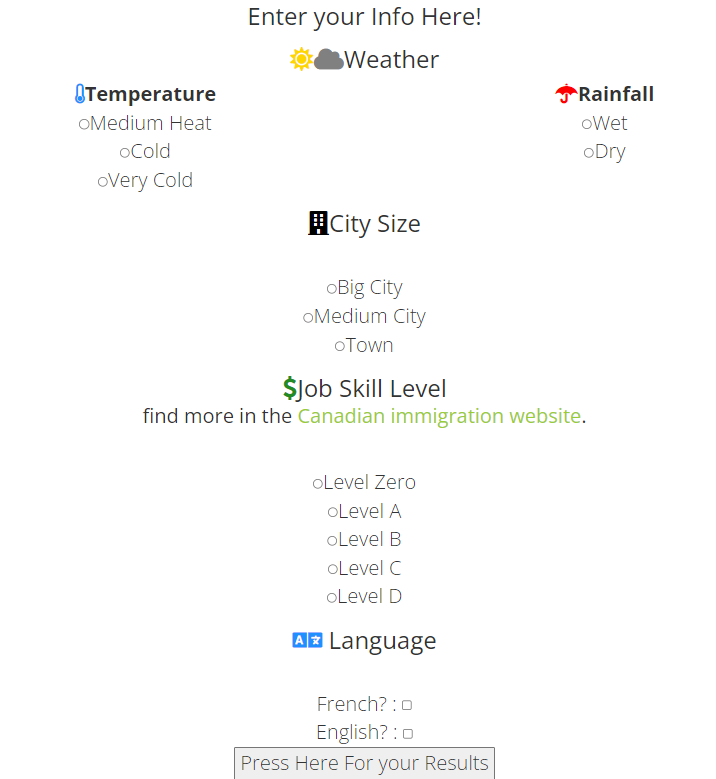
Canada Welcomes
Hackathons: McGill-Hacks, Canada
Welcomes
Idea: Helping newcomers choosing a Canadian city based on some inputs such as: size of the
city
, temperature , type of job...
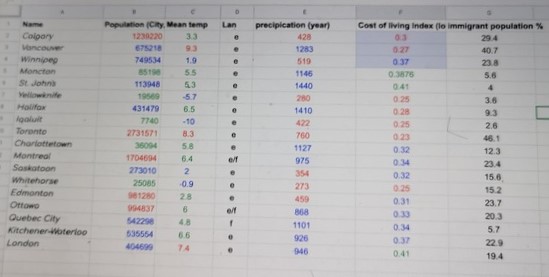
Data: We gathered Data mainly from Numbeo and Statistics
Canada.
Algorithm:Basically we manually categorized cities under (Low, Meduim, High) for each
parameter
(Population, Csot of living...), and at the end the programm will give the best match
(calculate
a score) and gives you the best match.
Challanges: We made the Java code and the front end separtely but
failed too establish a connection betwen the two, this app could work just fine with frontEnd
but no one in our team know how to JavaScript :), we were also hopping to get real
time
Data instead of hard coding it but we canceled as the Numbeo API wasn't free.
Check DevPost for more info
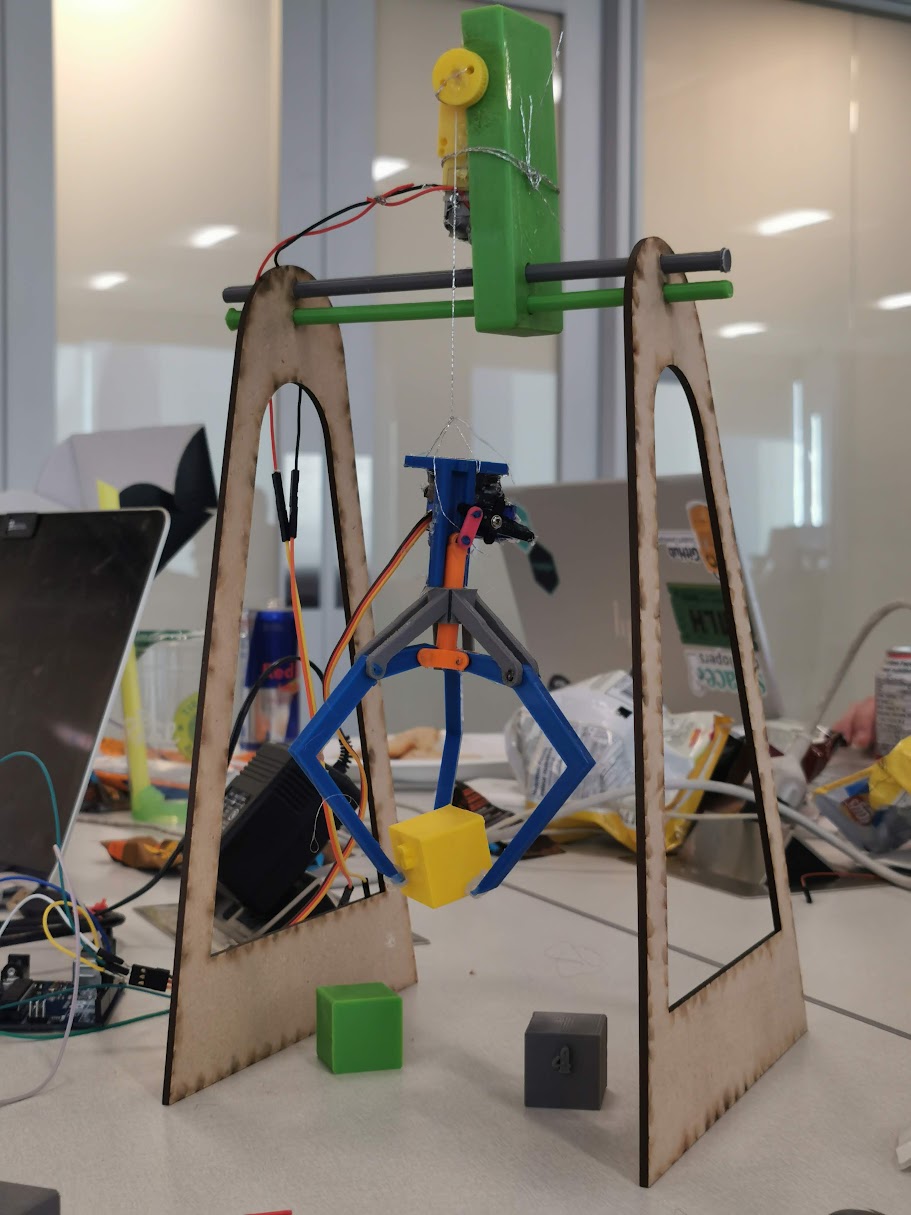
Better Delivery
Hackathons: uOttawaHacks
Idea: The project is supposed to help the efficenty of deliveries.
A software will compute the best
route depending on traffic and addresses in real time.
A robotic arm (inside the truck) will sort packages in a way
that
the driver will just pick from the heap (instead of going inside and manually looking for
items).
My contrubution:
3D modeling: I helped desing the 3D parts.
Mouvement: Connecting the 3D models with arduino and servo
motors.
Challanges:
Mechanical: faield to desing a that moves the arm on the
X-axis so we edup with:
Up/Down + Arm Open/Closed.
Software: failure to connect the Arduino app with Arduio:
Obviously we wern't
expewcting a full project with real time traffic Data but we were hoping to send some
hardCoded
data from the app to Arduino.
Check DevPost for more info
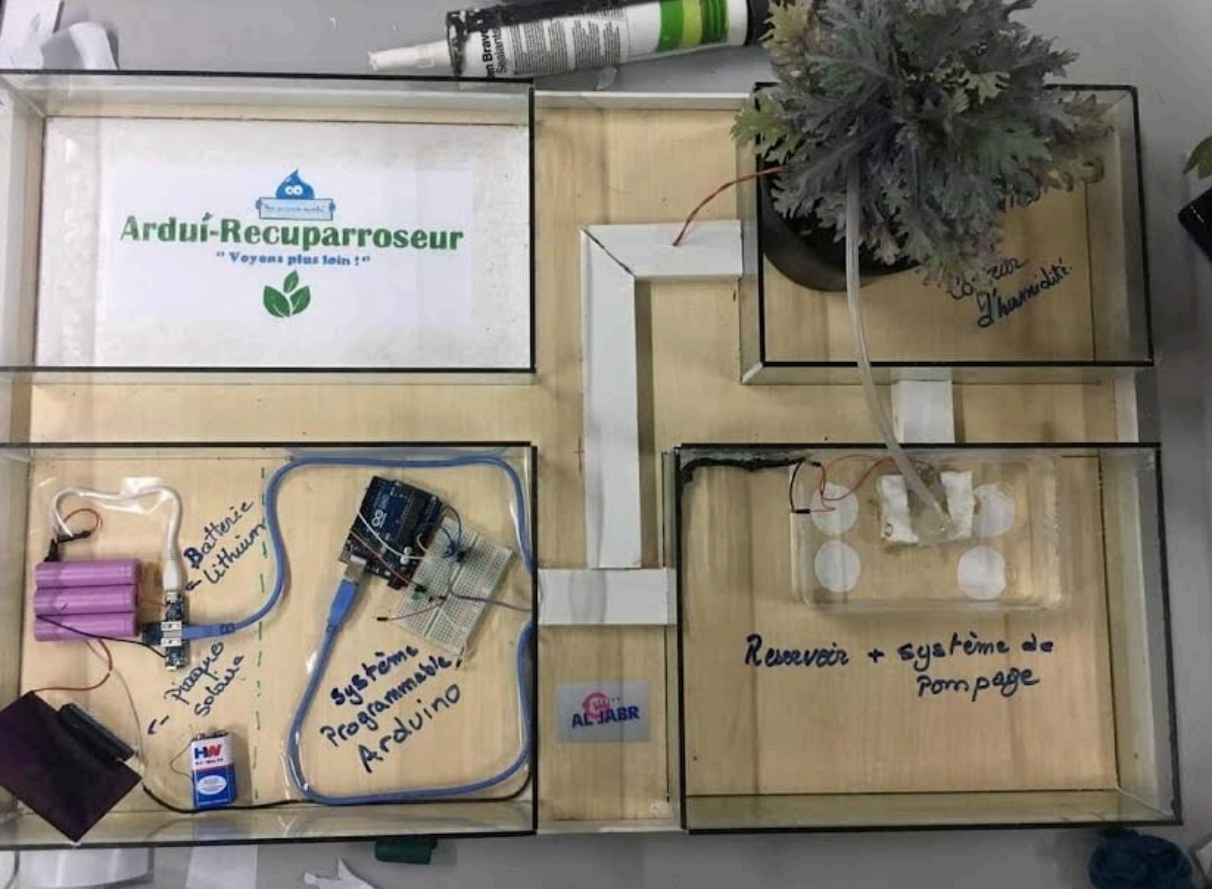
Automatic plant watering
Robotic contest: FABLAB "Printemps des Sciences" 2017
Intro: A basic Input/Output project: When the soil is dry , a signal is sent to the Arduino
to
turn on the Water pump -> when the water will reach the soil the Moisture sensor will send a
signal to stop the pump.
My contrubution:
I made the entire project except the frame.
Water pump: I made the pump with a syringe and a cartoy
DC-motor with the plunger on
its rotor(acting as impeller.)
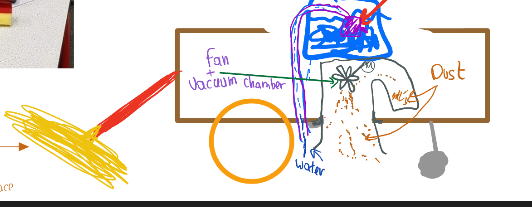
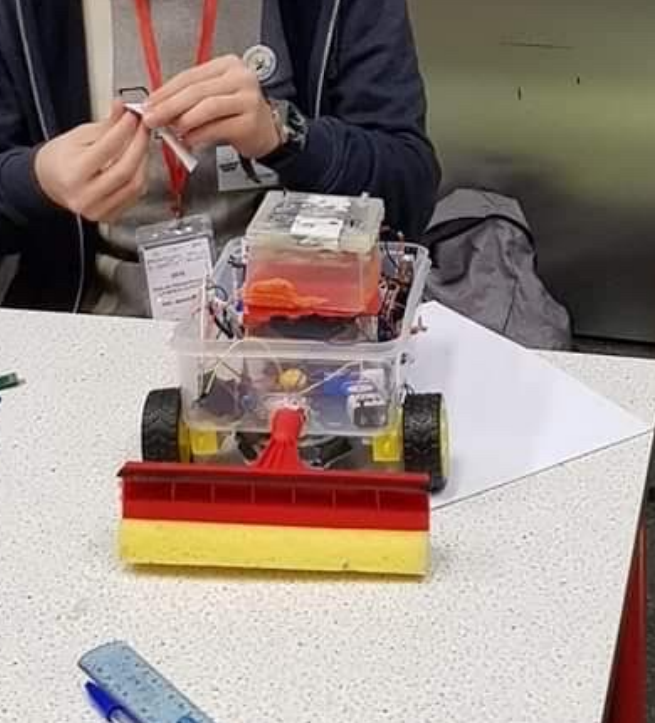
Cleaning robot
Robotic contest: FABLAB "Printemps des Sciences"
Intro: Vaccuming + Water cleaning Robot controlled remotly via bluethoot and an android app.
My contrubution:
Water pump: I made the pump with a syringe and a cartoy
DC-motor with the plunger on
its rotor(acting as impeller).
Android app: I unfortuanlly lost the .apk but it was a
simple
app made with MITappInventor to control: Speed,
Direction, Water
pump and Vaccum fan.